#robotyka



No i to faktycznie wygląda jak coś co mogłoby być wdrożone do dostarczania przesyłek #ciekawostki #robotyka #thefutureisnowoldman https://streamable.com/91mqhk
Zaloguj się aby komentować


Hirostyczna Chwila | Nadchodzą Roboty Domowe
Firma 1X uruchomiła przedsprzedaż NEO, humanoidalnego robota domowego. Wydarzenie to jest określane jako historyczny moment, ponieważ NEO jest wprowadzany na rynek jako pierwszy na świecie humanoidalny robot gotowy dla konsumentów. Urządzenie jest zaprojektowane do automatyzacji codziennych zadań...
Dajcie mu karabin
https://streamable.com/1puaqr
#robotyka #ciekawostki
Zaloguj się aby komentować

Osobiście nie mogę się doczekać przystępnych cenowo robotów humanoidalnych
#technologia #robotyka #heheszki

Coz, jeszcze z 20 lat do użytku domowego.
Mnie by bardziej podchodziło coś na kształt Jarvisa z Iron Mana. Poniekąd już jest to możliwe z użyciem agentów AI, ale strasznie dużo danych o sobie trzeba by było oddać korporacji.
Ten pan mówi, że to się nie stanie:

Zaloguj się aby komentować
#ciekawostki #robotyka #ai
https://streamable.com/lj7vqm

rób salto Kiemonbot

@Alawar ...to jest powód przez który jak roboty zorganizują powstanie, to będziemy mieć scenariusz z matrixa albo terminatora xD
Najman już mu rzuca wyzwanie.
Zaloguj się aby komentować


Orion V wyrusza na podbój Marsa
Przypomina niewielką koparkę, waży blisko 90 kilogramów, ma kolorową konstrukcję i porusza się na 40-centymetrowych, balonowych kołach. To Orion V, najnowszy łazik marsjański stworzony przez studentów Politechniki Lubelskiej. W dniach 29–31 sierpnia zmierzy się z najlepszymi zespołami świata...

Organizator zawodów łazików: nasze konkurencje są obecnie najtrudniejsze na świecie
Zawody robotów marsjańskich ERC w ciągu dekady istnienia przeszły kolosalne przemiany. Warto cenić każde miejsce zajęte w konkursie, bo nasze konkurencje są obecnie najtrudniejsze na świecie, a inni podpatrują, co robimy – powiedział PAP pomysłodawca i organizator tego wydarzenia, Łukasz...
Macie Nowości od Boston Dynamics: https://www.youtube.com/watch?v=LMPxtcEgtds
Do tego bardzo fajna pogadanka.
#bostondynamics #robotyka #sztucznainteligencja #ciekawostki


@rith - a co jakby dodać kilka kończyn z ostrzami
Zaloguj się aby komentować


@Yes_Man sporo klipów z hamerykanskiego "trudne sprawy"

@Yes_Man Polacy sie śmiejom, a Proszę mi pokazać nasze roboty, które umieją lepiej. Oh, wait..

Komentarz usunięty
Zaloguj się aby komentować

Polska robotyzuje przemysł 10 razy wolniej niż Niemcy. Kolejny słaby rok, a roboty to alternatywa dla tysięcy imigrantów
Aż o jedną trzecią w stosunku do 2021 r. spadło tempo robotyzacji przemysłu w Polsce – dowiedział się Forsal.pl z wiarygodnych źródeł. Azja ucieka Europie i Ameryce. Chiny montują ponad połowę wszystkich robotów przemysłowych na świecie.
Wedle naszych ustaleń, w 2024 r. cały przemysł w Polsce...

W Chinach udało się zrobotyzować Ekstraklasę
#ekstraklasaboners #chiny #robotyka

@entropy_ Ciekawe ile by nasi z nimi przegrali.

Wszyscy wyglądają na na⁎⁎⁎⁎ni w trzy d⁎⁎y więc wszystko się zgadza xd
Zaloguj się aby komentować
Oczami wyobrazni już widze za 2-3 dekady roboty, biegajace i rabujace sklepy w #usa
#ai #robotyka #technologia #takaprawda #heheszki

ciekawe jaki kolr farby beda mialy XD
Zaloguj się aby komentować

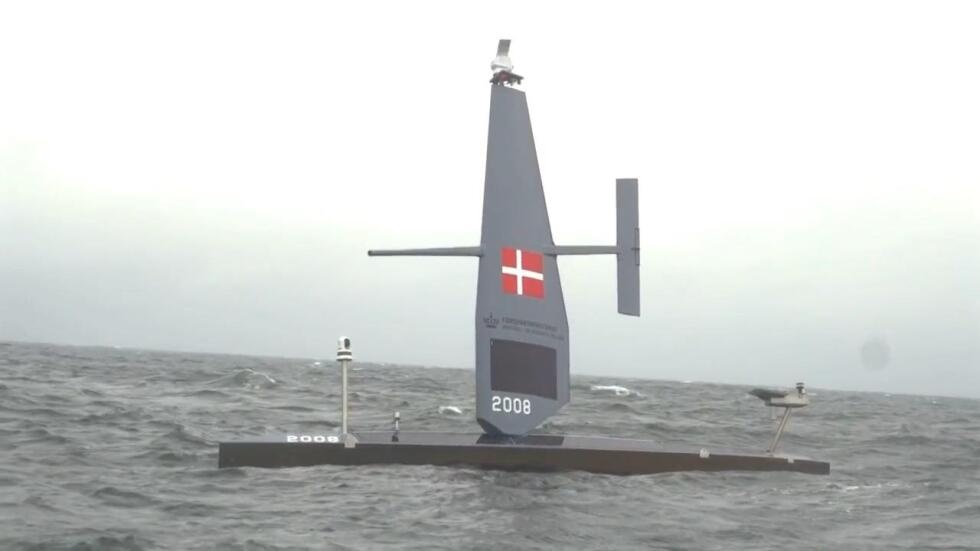
Dania testuje bezzałogowe żaglówki "Voyager" do nadzoru Bałtyku
Dania rozpoczęła trzymiesięczny test operacyjny czterech bezzałogowych robotycznych żaglówek typu „Voyager”, aby wzmocnić nadzór nad swoimi wodami i wodami NATO na Morzu Bałtyckim i Północnym. Te 10-metrowe jednostki, zbudowane przez kalifornijską firmę Saildrone, zostały wprowadzone do służby w odpowiedzi na gwałtowny wzrost napięć morskich i podejrzeń o sabotaż od czasu pełnoskalowej inwazji Rosji na Ukrainę w lutym 2022 roku.
Dwa z „Voyagerów” zostały zwodowane w poniedziałek z Koge Marina, około 40 km na południe od Kopenhagi. Dwa pozostałe dołączyły do patrolu NATO już 6 czerwca. Żaglówki te, choć z daleka wyglądają jak zwykłe...

Studenci z Rzeszowa najlepszym europejskim zespołem w University Rover Challenge
Studenci Politechniki Rzeszowskiej zajęli piąte miejsce w międzynarodowych zawodach robotycznych University Rover Challenge 2025. To najwyższa pozycja uzyskana przez ekipy spoza Ameryki Północnej.
Zawody University Rover Challenge 2025 odbywały się w amerykańskim stanie Utah. W rywalizacji wzięło...

Uczelnia sprawiła sobie cyberpupila. Dotrze tam, gdzie nie wejdzie człowiek
Ma cztery łapy, coś na kształt ogona, kosztuje tyle, co dwa bardzo dobre samochody i jest nazywany psem. Nowy pupil naukowców z Politechniki Lubelskiej to nowoczesny robot, który dotrze tam, gdzie nie wejdzie człowiek, a przy tym pomoże w pracach nad innymi robotami.
Nie szczeka, nie gryzie,...
Tesla Optimus (Prime).
Jeszcze tylko inteligentne ai i ludzie zapraszam wypierdalać.
Ogólnie, to stoimy na przednówku zmian porównywalnych z rewolucją przemysłową, ale ludzie się łudzą, że nie będzie tak źle. Tyle że tym razem koniem będzie człowiek.
#ciekawostki #robotyka #ai #technologia

Za⁎⁎⁎⁎ście, nie tak dawno śmialiśmy się z wypieprzającego się robodoga, a w zasadzie co dzisiaj stoi na przeszkodzie żeby to wypuścić na ulicę zaprzęgnięte w jakąkolwiek aktualnie dostępną AI
@mortt @Nemrod nie zdajecie sobie chyba sprawy ze skali postępu. ~20 lat rozwoju mechaniki ruchu i w zasadzie wszystkie problemy zostaly rozwiązane. Teraz trwają prace nad takimi "pierdołami" jak np. unerwiona sztuczna skóra czy sztuczne mięśnie.
Nie zdajecie sobie sprawy ze skutków masowej produkcji i jaki ma to wpływ na cenę danego towaru.
Nie zdajecie sobie sprawy co mogą i co będą robić roboty humanoidalne - na pewno nie będą stać na taśmie przy produkcji, bo to ogarniają wyspecjalizowane maszyny.
Śmieszne pieski jeszcze 5 at temu się wywracały, a dziś patrolują posesje.
Oczywiste jest, że te zmiany nie nastąpią natychmiastowo. Ale nastąpią i będzie problem, co z bezrobotną biomasą robić.

Ciekawe jak im wychodzi chodzenie po nierównościach, jak z precyzją ruchu przy np. nalaniu wina do kieliszka, a następnie przeniesienie go.
Ale roboty mogłyby wziąć udział w you can dance i zarabiać na swój dalszy rozwój
Zaloguj się aby komentować
W Polsce jest 78 robotów na 10 tys. zatrudnionych. Średnia europejska to 430, w Niemczech jest średnio 429, w Chinach jest to około 470 robotów, a w Korei Pd., która jest najbardziej zrobotyzowanym krajem na świecie - 1012.
Używając innych miar, u nas jeden robot przypada na 5 januszeksów *), a w Korei każdy januszeks ma przynajmniej 3 roboty.
*) firma mała, zatrudniająca ok. 30 osób.
#ciekawostki #gospodarka #robotyka #ai





@kitty95 Największy wpływ na to ma struktura naszej "gospodarki". Żeby robot się spłacił i opłacał, powinien względnie długo wykonywać tą samą pracę, oraz stosunkowo rzadko być reprogramowany.
Dlatego najbardziej się to opłaca albo bardzo dużym firmom, najlepiej globalnym - które jeśli robią serię produktową to ma duży wolumen, bądź są względnie stabilne co do sposobu funkcjonowania. Wystarczy jeden duży stabilny producent, aby automatyzował się również cały plankton podwykonawców - bo mają stabilnego odbiorcę z długoterminowymi kontraktami, stąd opłaca się taki zakup.
My mamy takich firm bardzo mało. Zbyt dużo lokalnych marek, które dużo kombinują. W samej strukturze dużych działalności królują takie, gdzie człowiek i tak może być nadal szybszy i sprawniejszy. Lub - jak w przypadku na przykład InPostu - paradoksalny duży wzrost nieco hamuje robotyczne rozwiązania, bo nie chcą stać na tym co teraz, a mają w planach znaczną rozbudowę pod tradycyjną kurierkę, loty, wielkie gabaryty - więc też robią to w ograniczonym stopniu. Inne jak cała budowlanka, sektory wydobywcze - tak czy owak głównie ludzie.
Sam powiem na swoim przykładzie, że z chęcią bym robotyzował i inwestował w to - bo są możliwości. Niestety, nie zwróci mi się to. Podobnie jak cała masa innych firm, które działają ale nie są wielopokoleniowe, jest masa innych rzeczy do inwestycji w pierwszej kolejności. I to też jest problem. Kapitał i koszty jego zdobywania, bo kredyty drogie jak cholera, a państwo ulg nie daje. Firmy w wielu krajach to nie są firmy jak u nas, działające 15 lat, a przykładowo 70/90 i te kilka pokoleń mogło zbudować zarówno podstawowy kapitał, jak i wyeliminować konieczność tak błahych inwestycji jak chociażby grunty.
Będzie się to zmieniać dynamicznie i ja widzę tutaj paradoksalnie szansę, a nie problem. Sądzę, że w automatyzację i robotyzację wejdziemy nieco później, ale za to już na wysokim standardzie i pułapie. Podobnie jak było z internetem i bankowością. Kiedyś patrzyliśmy z zazdrością na Niemców, a dzisiaj w tych sektorach są daleko w tyle z infrastrukturą za nami. U nas jest nowocześnie, bo wzięliśmy dojrzałe technologie, a oni do dzisiaj walczą z problemami wieku dziecięcego tychże. Tak widzę też robotyzację - wejdziemy w nią naturalnie wraz z rozwojem gospodarczym, ale w dobrym momencie, zapewne po rewolucji AI. A dzięki temu znów możemy mieć stabilną i porządną technologię kupioną i wdrożoną w odpowiednim momencie. Mogłoby być lepiej, gdybyśmy sami mieli jakiekolwiek firmy innowacyjne, technologiczne, badawcze - ale skoro nie mamy i jesteśmy tylko importerami technologicznymi, to sądzę że to nieco wymuszone przeczekanie ostatecznie wyjdzie jednak na plus. Zakładając oczywiście stabilność na świecie, ale to już inny temat.
@onpanopticon zgadzam się, ale nie bierzesz też pod uwagę mentalu. Po co wydać na robota pół bańki jak można na M8 czy innego Bentleya.
Natomiast faktem również jest, że polska ma małą bazę produkcyjną, zwlaszcza hi-tech, więc i miejsc do automatyzacji jest relatywnie mniej. I wątpię żeby się to zmieniło w najbliższej przyszłości.
Mamy szansę pobudzać rozwój sektora produkcyjnego inwestycjami w zbrojeniówkę. Innych szans zbyt wiele nie ma.
@kitty95 Mentalność oczywiście też odgrywa tutaj rolę, aczkolwiek wiele krajów które stoją przed nami w takich statystykach ma jeszcze gorszy mental, a jednak wyprzedzają. Stąd nakreślenie przeze mnie innych kwestii.
A ta mentalność też się bierze właśnie z tego co pisałem wcześniej. Mamy pierwsze pokolenia dorobkiewiczów i nie dziwne, że chcą korzystać z pieniądza. W dojrzałych gospodarkach firmy są wieloletnie i dzieci już się w tym bogactwie chowały, stąd te rzeczy im aż tak nie imponują.
Wiesz, ja sam mógłbym bardziej rozwijać firmę, ale chcę czasami kupić coś fajnego - skoro całą młodość żyłem w chacie z gówna i załatwiałem swoje potrzeby w wychodku
Byłem na rozmowie w fabryce gdzie mają roboty, bodajże montażowe i spawalnicze. Kurde jaki to jest bajer XD
I to jeszcze firma prywatna, jeden Polak właściciel, ale facet z rozmachem.
@kitty95 ale to już się dzieje. W dużych firmach magazyn jest obsługiwany przez systemy paletowe w pełni zautomatyzowane. Zamiast 40 operatorów wózka widłowego jest jeden gościu obsługujący system paletowy z tabletem. Kilka firm w mazowieckim btw.
Zaloguj się aby komentować
Marzy mi się to, żeby za jakies max 20 lat mieć takiego, już w pełni funkcjonalnego robota, który zrobiłby za mnie podstawowe domowe czynności - sprzątanko, gotowanko, wyjście do sklepu po bułki, prasowanko, pranko itd.
Ja w tym czasie móglbym spokojnie zająć się spamowaniem hejto
#technologia #ai #robotyka #przemyslenia
ponoć startup z Wrocławia ma plan Ci to umożliwić: https://nofluffjobs.com/pl/log/aktualnosci/polski-humanoidalny-robot-clone-alpha-robotics-konkurent-tesla-optimus/
@sumrzeczny to juz nie jest dawno polski startup
Czekałem jak mu jebn i e

Za 50 lat moze
@bartek555 Technologia dojrzewa zwykle od prototypów do dojrzałej formy jakieś 30 lat, tak więc niestety możesz mieć rację.
Zaloguj się aby komentować


@banita77 zaczęło się.
Czy już się zaczęło?
Już zaczęli.
Zaczęli już?

zrobotyzowali typowego starego
Zaloguj się aby komentować